Harsh Environments Autonomous Robots Group

Fuzzy Ensembles of Reinforcement Learning Policies for Robotic Systems with Variable Parameters
Harsh Environments Autonomous Robots Group
3
11
8 дней назад
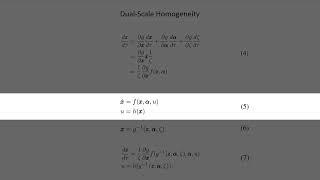
Reinforcement Learning Generalization Through Dual-Scale Homogeneity Transformations
Harsh Environments Autonomous Robots Group
13
43
2 месяца назад

Learning to Navigate Through Reinforcement Across the Sim2Real Gap
Harsh Environments Autonomous Robots Group
42
141
2 года назад

Multirotors From Takeoff to Real-Time Full Identification using MRFT and DNNs
Harsh Environments Autonomous Robots Group
181
603
3 года назад
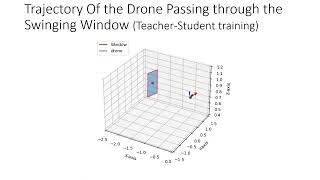
Trajectory Of the Drone Passing through the Swinging Window (Teacher-Student training)
Harsh Environments Autonomous Robots Group
6
21
9 месяцев назад

Learning-based Navigation and Collision Avoidance through Reinforcement for UAVs
Harsh Environments Autonomous Robots Group
34
112
1 год назад

VisTune: Auto-Tuner for UAVs Using Vision-Based Localization
Harsh Environments Autonomous Robots Group
10
34
5 месяцев назад

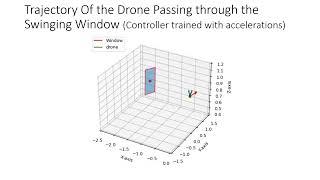
Trajectory Of the Drone Passing through the Swinging Window (Controller trained with accelerations)
Harsh Environments Autonomous Robots Group
9
30
9 месяцев назад

Wonder Studio Ai | Robot Fighting Humans No Mocap Suit Needed!! Robot Replaces Human Actor
Solomon Jagwe
284K
947,817
1 год назад


China has Released its Most Advanced Robots that Can Do Anything
Carros Show
103K
344,170
8 месяцев назад






Tesla Will Hit $550 In 40 Days Said By Alexendra Mertz | Tesla Stock News
Lion Of Wall Street
3K
10,326
4 дня назад

Dynamic Locomotion of a Quadruped Robot with Active Spine via Model Predictive Control (ICRA 2023)
Wanyue Li
3K
9,576
1 год назад

Jim Fan on Nvidia’s Embodied AI Lab and Jensen Huang’s Prediction that All Robots will be Autonomous
Sequoia Capital
4K
13,823
2 дня назад

Noise Tolerant Identification and Tuning Approach Using DNNs For Visual Servoing Applications
Harsh Environments Autonomous Robots Group
20
65
1 год назад
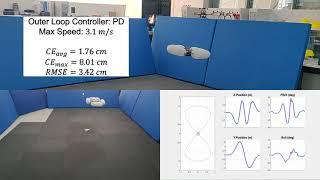
Systematic Online Tuning of Multirotor UAVs for Accurate Trajectory Tracking
Harsh Environments Autonomous Robots Group
74
247
2 года назад
Neuromorphic Vision-based Motion Segmentation with Graph Transformer Neural Network
Harsh Environments Autonomous Robots Group
38
125
1 год назад

Real-time Adaptive Dynamics Based State Estimation Scheme for Unmanned Aircrafts
Harsh Environments Autonomous Robots Group
12
40
2 года назад

Autonomous Spot: Long-Range Exploration of Extreme Environments (IROS 2020 Talk)
TeamCoSTAR
527
1,758
3 года назад
Neuromorphic Vision-based Motion Segmentation with GTNN Algorithm (Qualitative Evaluation)
Harsh Environments Autonomous Robots Group
8
28
1 год назад

A Neuromorphic Vision-Based Measurement for Relative Localization in Space Exploration Missions
Harsh Environments Autonomous Robots Group
26
87
1 год назад


Neuromorphic Camera Denoising using Graph Neural Network-driven Transformers
Harsh Environments Autonomous Robots Group
50
165
2 года назад
Сейчас ищут
Harsh Environments Autonomous Robots Group
Jugadas
Lock
Gamespot
The Norman Lear Effect
Дамир Губайдулин
Robot Fights
Сёма И Нивеа Мен Фулл
Finikland
Dimitar
韓国人先生デボちゃん
Iron Maiden Eddies Archive
Çetin Tekindor
Formula Today
Jiskiran
Сель
Vanitymoth
Samwitch
Disinfectantcleaner
קנסות
Mʀ Ƭӈơʀƨơɲ
Retrigger
껌Tv
Thespadehammerbro
Cloverbeats
Theastrohistorian
Profan
Alex Moore
Snmusic
회전
Akash Kunver
English Channel Refugees
Harsh Environments Autonomous Robots Group. Смотреть видео: Fuzzy Ensembles Of Reinforcement Learning Policies For Robotic Systems With Variable Parameters, Reinforcement Learning Generalization Through Dual Scale Homogeneity Transformations, Learning To Navigate Through Reinforcement Across The Sim2Real Gap, Multirotors From Takeoff To Real Time Full Identification Using MRFT And DNNs.